Российские учёные повысили точность управления медицинскими роботами
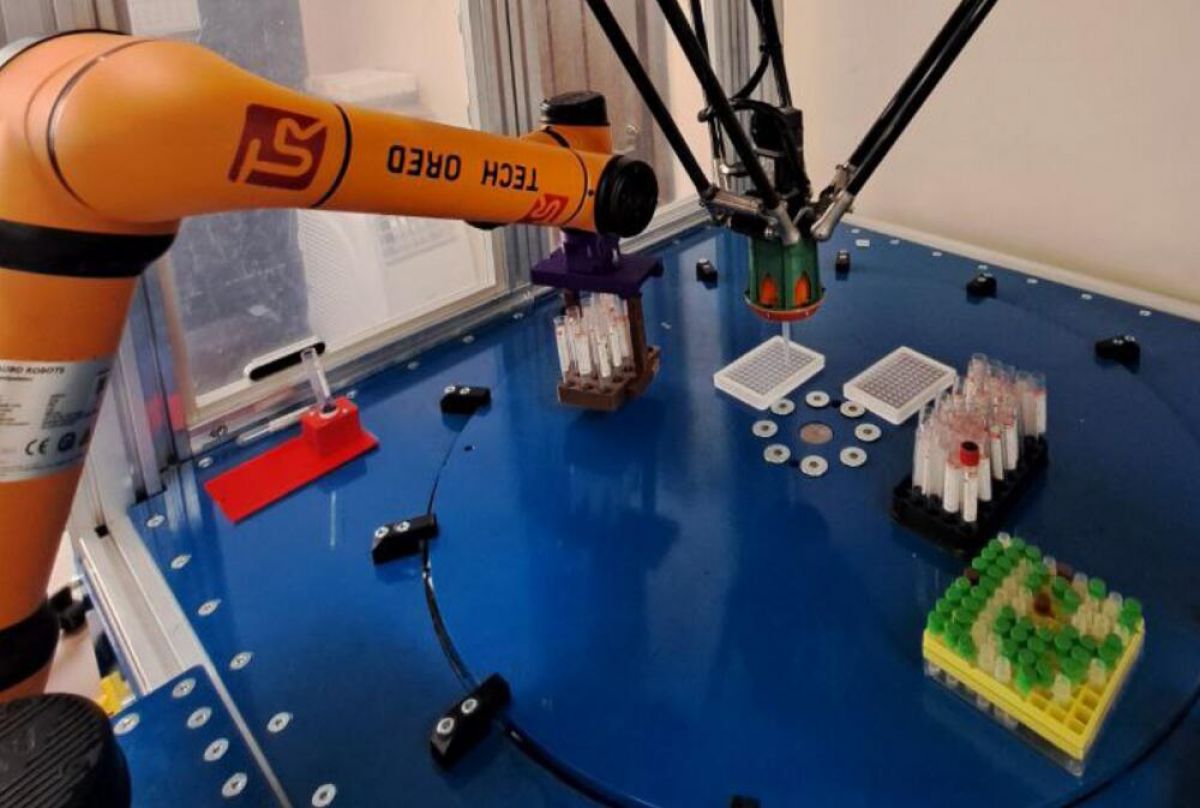
Фото: сайт МИСИС
Специалисты из НИТУ МИСИС, ФИЦ ИУ РАН и БГТУ имени В.Г. Шухова разработали новый алгоритм для управления медицинским роботами, способный предотвратить столкновения манипуляторов в узких рабочих зонах. Современные медицинские лаборатории используют несколько манипуляторов одновременно, что повышает требования к точности и согласованности их движений.
Созданная учёными программа позволяет заранее рассчитать безопасные маршруты, исключив возможность столкновения устройств и ускоряя процесс выполнения задач. Алгоритм успешно прошел испытания на двух манипуляторах, работающих с жидкими веществами и пробирками, показав ошибку менее 1 мм по горизонтали и 0,2 мм по вертикали.
Новая технология призвана ускорить процессы диагностики и обработки образцов в медицинских лабораториях, повысив эффективность и качество автоматизированных процессов. Результаты исследований опубликованы в международном журнале Machines.